

ADAS解説シリーズ|安全性能を正しく理解し、正しく修理するために。
パノラミックビュー・全方位カメラ編
〜“俯瞰映像”は映像ではなく“演算結果”〜
最近の車両では
・パノラミックビューモニター
・アラウンドビューモニター
・ 360°ビュー
・アドバンストパーク
・プロパイロットパーキング
などが一般化しています。
「カメラ映像を映しているだけ」と思われがちですが、実際は全く違います。

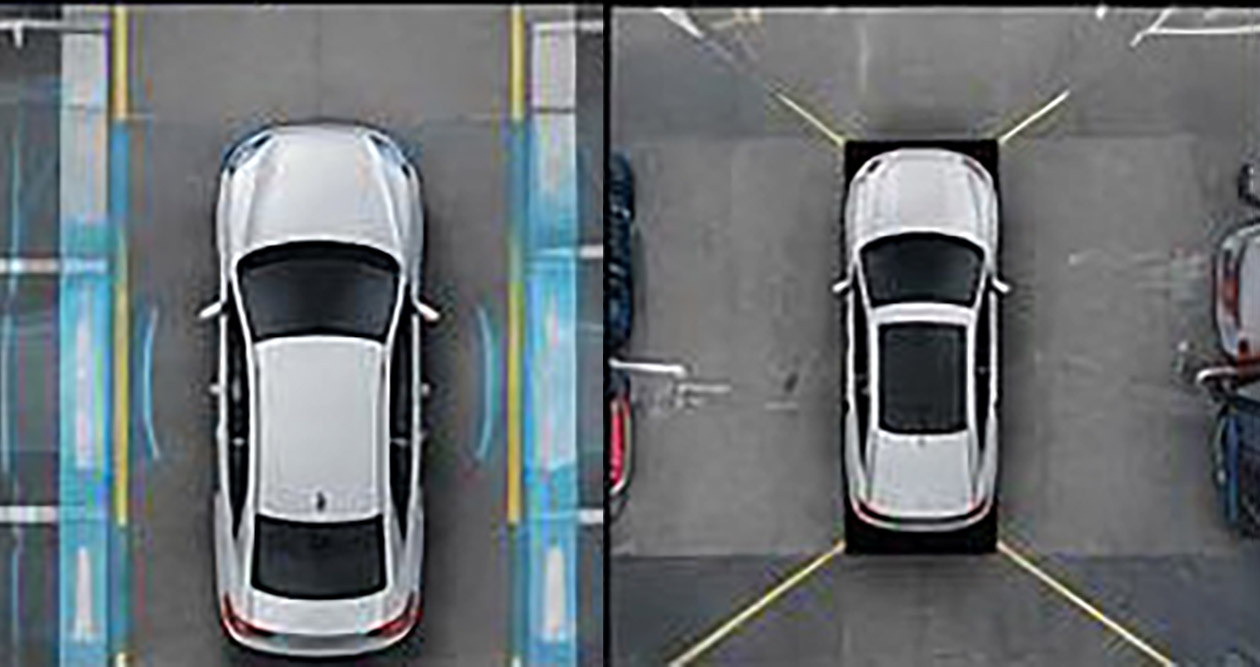
■俯瞰映像の正体
全方位カメラの俯瞰映像は“実際に上から撮影している映像”ではありません。
車両に搭載された。前後左右のカメラ画像をECU側で演算合成し、疑似的な上空視点映像を作り出しています。
つまり “映像”ではなく演算結果なのです。
■なぜエーミングが必要なのか?
全方位カメラでは 各カメラの位置情報を前提に演算しています。
「カメラ高さ」「カメラ角度」「車両中心」「タイヤ位置」「車幅情報」などがズレると合成映像もズレます。

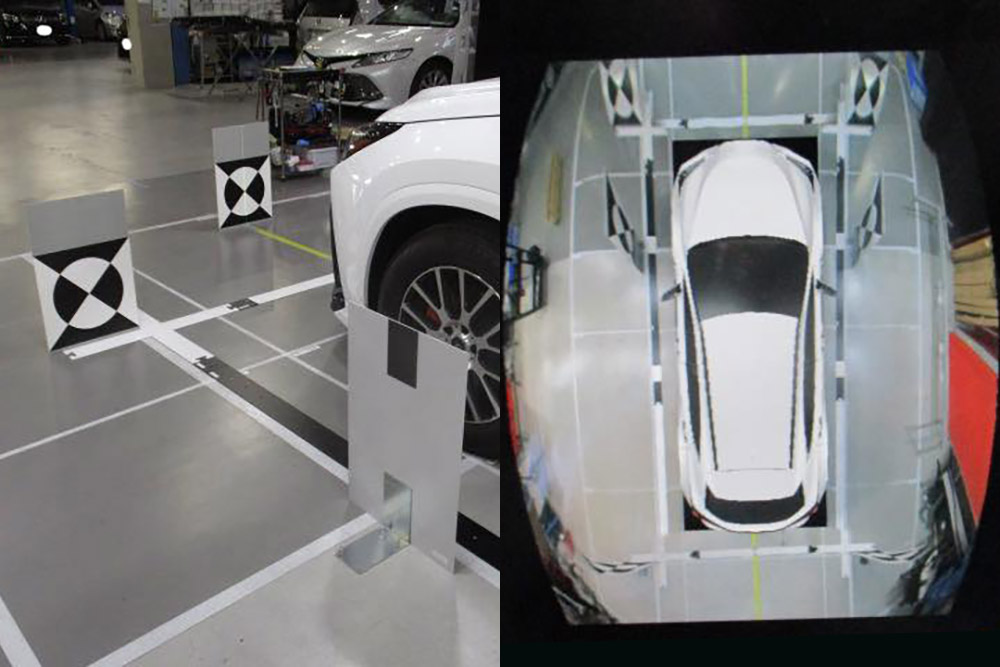
■実際に起こる症状
例えば「白線がズレる」「左右ラインが繋がらない」「車両周囲が歪む」「駐車枠が斜めになる」など。
これらは “映像のズレ”ではなく 演算条件のズレです。

■重要な要素① カメラ位置と車両姿勢
全方位カメラでは車両中心基準で各カメラを合成しています。
つまり「車高変化」「タイヤ空気圧差」「サスペンション変化」「修正状態」などでも演算結果へ影響します。
特に重要なのは全方位カメラは “新車時車高”を前提に演算されているという点です。
つまり、経年変化、積載状態、サスペンション劣化、意図的なローダウン/リフトアップなどが発生している場合。
整備要領書通りのターゲット設置位置では、画像ズレが完全に解消しないケースがあります。
一定の法則性を理解していれば現車に合わせた画像補正も可能です。
但しこの場合「整備要領書基準値とは異なる調整」になるためユーザーへ正しく説明する必要があります。
■重要な要素② 背景と光環境
全方位カメラは「光学カメラ」です。
つまり「光反射」「逆光」「床反射」「外光変化」の影響を受けます。
つまり光環境管理は重要なのです。

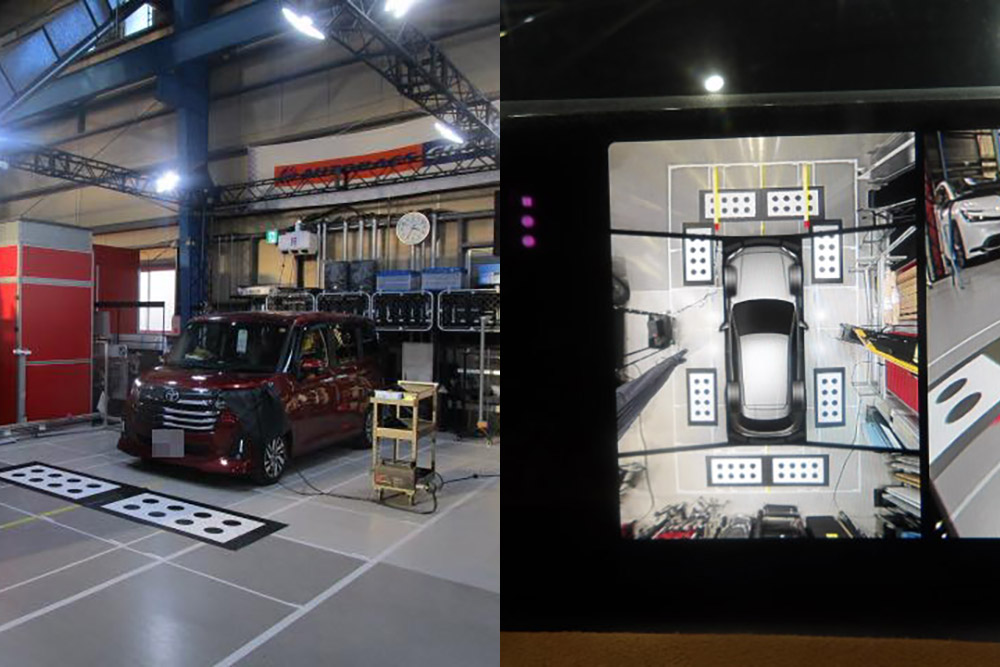
■重要な要素③ ターゲットとマーカ精度
全方位カメラでは “置いた”ではなく、正確な空間位置に存在していることです。
例えば「数mmのズレ」「ライン歪み」「マーカ角度ズレ」でも演算誤差になります。
そのため弊社では「3Dレーザー」「デジタル距離計」「専用マーカ」「 専用ライン」を使用しています。
■OEMごとの違い
実は全方位カメラもOEMごとに思想が異なります。
例えば「ドット認識タイプ」「ライン認識タイプ」「パターン認識タイプ」などがあります。
さらに「カメラ単体補正」「車両全体合成補正」「駐車支援連動補正」なども存在します。
つまり“全方位カメラ”という名前でも中身はかなり違うのです。
■最近の変化
最近の車両では「自動駐車」「アドバンストパーク」「プロパイロットパーキング」「メモリーパーキング」「障害物回避制御」などへ進化しています。
つまり “映像表示”から”車両制御情報”へ変化しています。
そのため数mm、数度レベルのズレでも制御結果へ影響する時代になっています。
■完成表示の落とし穴
全方位カメラでは登録完了表示していても実際にはズレているケースがあります。
つまり “完了した”と “正しく演算されている”は別問題です。
そのため弊社では実映像確認を非常に重視しています。
■作業の本質
全方位カメラ調整はカメラ調整ではなく “空間演算補正作業”です。
重要なのは“綺麗に映る”ではなく、“正しく計算されているか”です。